正如 Pantera Capital 合伙人 Nihal Maunder 所说:
“如果我们希望智能机器在开放环境中运行,就需要一个开放的智能网络。OpenMind 正在为机器人做的事,就像 Linux 之于软件、以太坊之于区块链。”
团队与顾问:从实验室到产线OpenMind 的创始人 Jan Liphardt 为斯坦福大学副教授、前伯克利教授,长期研究数据与分布式系统,在学界与工程侧均有深耕。他主张推进开源复用、以可审计、可追溯的机制替代黑箱、用跨学科方法整合AI、机器人和密码学。
OpenMind 的核心团队来自OKX Ventures、Oxford Robotics Institute、Palantir、Databricks、Perplexity等机构,覆盖机器人控制、感知与导航、多模态与 LLM 调度、分布式系统与链上协议等关键环节。同时,一支由学术界与产业界专家组成的顾问团队(如 Stanford 机器人负责人 Steve Cousins、牛津区块链中心 Bill Roscoe、Imperial College 安全 AI 教授 Alessio Lomuscio)也为机器人的“安全、合规、可靠”提供保障。
OpenMind 的解法:两层架构,一套秩序OpenMind 构建了一套可复用的基础设施,让机器人能跨设备、跨厂商、甚至跨国界协作与信息互通:
-
设备侧:提供面向实体机器人的 AI 原生操作系统 OM1,把从感知到执行的全链路连成闭环,让不同形态的机器都能理解环境并完成任务;
-
网络侧:构建去中心化协作网络 FABRIC,提供身份、任务分配与通信机制,确保机器人在协作时能识别彼此、分配任务、共享状态。
这一套“操作系统+网络层”的组合,让机器人们不仅能各自行动,更能在一个统一的协作网络中互相配合、对齐流程、一起完成某个复杂任务。
OM1:面向实体世界的 AI 原生操作系统就像手机需要 iOS 或 Android 来运行应用,机器人同样需要一个操作系统来运行 AI 模型、处理传感器数据、做出推理决策并执行动作。
OM1便为此而生,它是一个面向现实世界机器人的 AI 原生操作系统,让它们能够感知、理解、规划并在各种环境中完成任务。与传统、封闭的机器人控制系统不同,OM1 是开源、模块化、硬件无关(hardware-agnostic)的,它可以运行人形、四足、轮式、机械臂等多种形态上。
四个核心环节:从感知到执行OM1 把机器人智能拆解为四个通用步骤:Perception(感知) → Memory(记忆) → Planning(规划) → Action(执行)。这套流程被 OM1 完整模块化,并通过统一的数据语言打通,实现可组合、可替换、可验证的智能能力构建。
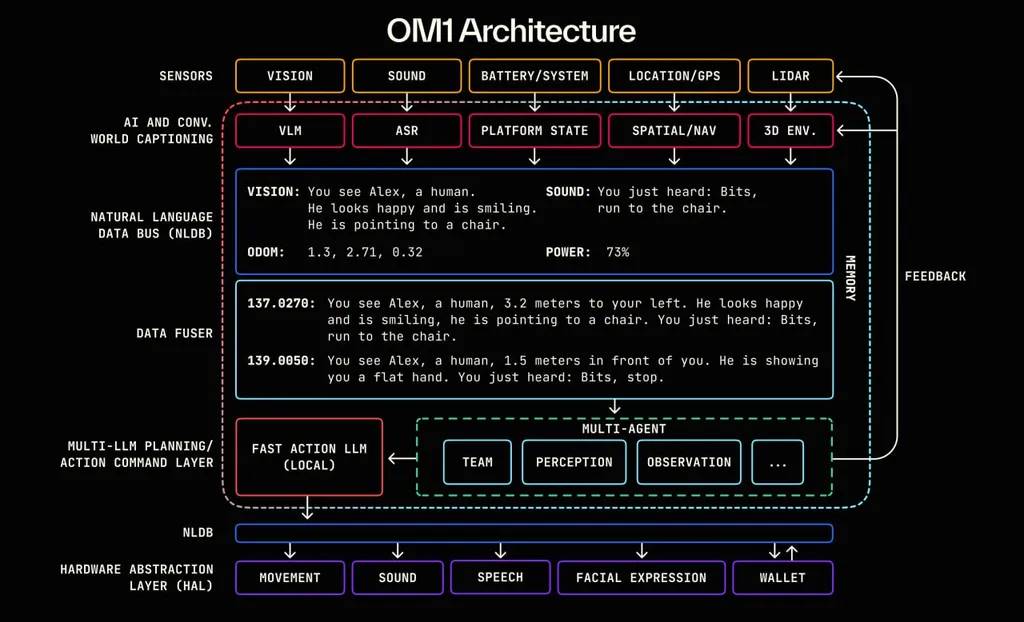
OM1 的架构
具体到架构,OM1 的七层链路如下: